
Nirmal S. Nair
Computer Vision, 3D Reconstruction, SLAM, Spatial Computing
About Me
Hi, I’m a computer vision researcher specializing in 3D reconstruction and spatial computing, with a focus on developing practical, end-to-end systems.
My work sits at the intersection of multi-view geometry, real-time reconstruction, and interactive 3D systems, including recent directions in hybrid scene representations such as Gaussian Splatting.
During my PhD, I focused on multi-view stereo, exploring numerical and metaheuristic optimization techniques to address ill-posed problems in multi-view geometry. This experience continues to inform how I design reconstruction pipelines and evaluate newer representations.
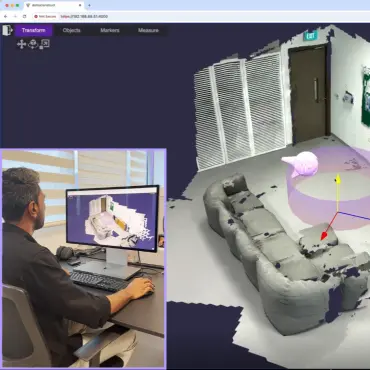
More recently, I worked on R3CAP, an open-source platform for real-time scene capture, editing, and collaboration across web and VR. The system integrates SLAM, digital twins, and multi-user 3D interaction, and was showcased at SIGGRAPH 2024 Labs and CHI 2025 Interactivity.
I also work with learning-based approaches for scene understanding and 3D perception, particularly in settings where learned models and geometric methods need to work together reliably (e.g., robot perception in real-world environments).
I am particularly interested in:
- 3D reconstruction, SLAM, and real-time systems
- Computer vision and robot perception for 3D understanding
- Hybrid representations bridging geometric and learned methods
- Spatial computing and interactive 3D tools
Publications
Collaborative Scene Authoring with Near Real-Time 3D Reconstruction [project]
Leon Foo, Nirmal S. Nair, Liuziyi Liu, Jeannie Su Ann Lee, Songjia Shen, Indriyati Atmosukarto, Alvin Chan, Jing Shi, Yong Joo Loh, Yih Yng Ng, Michael Chia, Chek Tien Tan
ACM CHI 2025 Interactivity
demoConstruct: Democratizing Scene Construction for Digital Twins through Progressive Reconstruction [code]
Leon Foo, Chek Tien Tan, Liuziyi Liu, Nirmal S. Nair, Songjia Shen, Jeannie Lee
ACM SIGGRAPH 2024 Labs
Multi-View Stereo Using Graph Cuts-Based Depth Refinement [code]
Nirmal S. Nair, Madhu S. Nair
IEEE Signal Processing Letters, 2022
Multi-view Stereo using Cross-view Depth Map Completion and Row-column Depth Refinement
Nirmal S. Nair, Madhu S. Nair
SPIE International Conference on Digital Image Processing, ICDIP 2021
Scalable Multi-view Stereo using CMA-ES and Distance Transform-based Depth Map Refinement [code]
Nirmal S. Nair, Madhu S. Nair
SPIE International Conference on Machine Vision, ICMV 2020
On Evolutionary Computation Techniques for Multi-view Triangulation
Nirmal S. Nair, Madhu S. Nair
Machine Vision and Applications, Springer, 2020
Projects
R3CAP
SLAM · Gaussian Splatting · WebXR
-
An open-source platform for real-time 3D capture and collaborative scene authoring. Combines SLAM-based geometry with explicit radiance field representations (e.g., 3D Gaussian Splatting) for interactive visualization and editing.

Multi-View Stereo Reconstruction
3D Reconstruction · Depth Estimation · Graph Cuts
-
A multi-view stereo framework that combines metaheuristic optimization and graph cuts to produce accurate and consistent depth maps, with robustness to occlusions and low-texture regions.
Research Experience
Research Fellow
Centre for Immersification, Singapore Institute of Technology (2023 - 2025)
- Developed real-time 3D capture and digital twin systems, integrating SLAM, depth sensing, and interactive web/VR tools.
- Worked on interactive systems including a 3D vision-based telepresence system (RoboArm), focusing on real-time performance and usability.
PhD Researcher
Department of Computer Science, University of Kerala (2015 - 2022)
- Conducted research in multi-view stereo, developing depth map-based methods to improve scalability, reconstruction accuracy, and robustness to occlusions and untextured regions.
- Investigated metaheuristic optimization for improving solutions in multi-view stereo and triangulation.